












ZIP
۲۰,۰۰۰ تومان
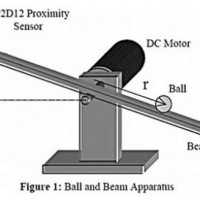
پروژه درس کنترل مدرن
پروژه درس کنترل مدرن سیستم توپ و میله زیر را در نظر بگیرید، هدف کنترلی ذر این سیستم، قرار دادن توپ در هر مکانی روی میله با تغییر گشتاور موتور می باشد. برای رسیدن به این هدف، سیستم با گام های مختلف مدلسازی، شبیه سازی و کنترل مورد بررسی قرار می گیرد و در نهایت کنترل خواهد شد. در این بخش به مدلسازی سیستم می پردازیم. فرض کنید ورودی کنترلی گشتاور [...]
ادامه مطلب
تاریخ : 01 / مارس / 2018 بازدید : 4694 نویسنده : ایمتلب























